14
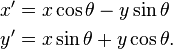
Aşağıdaki yaklaşımlardan herhangi biri, bir nokta döndürmek için doğru matematiği kullanır mı? Varsa hangisi doğrudur?Menşei Arasında Bir Nokta Döndürmek İçin Uygun Trigonometri
POINT rotate_point(float cx,float cy,float angle,POINT p)
{
float s = sin(angle);
float c = cos(angle);
// translate point back to origin:
p.x -= cx;
p.y -= cy;
// Which One Is Correct:
// This?
float xnew = p.x * c - p.y * s;
float ynew = p.x * s + p.y * c;
// Or This?
float xnew = p.x * c + p.y * s;
float ynew = -p.x * s + p.y * c;
// translate point back:
p.x = xnew + cx;
p.y = ynew + cy;
}

I don' t oldukça anladım. Cx ve cy nedir? Ayrıca, POINT türündeki işlevinizi bildirdiniz, ancak bir NOKTA ya da hiçbir şey döndürmez. –
@Brian Hooper: anlamlı değişken isimlerin faydalarını belirtmek için +1;) – Cogwheel